Description
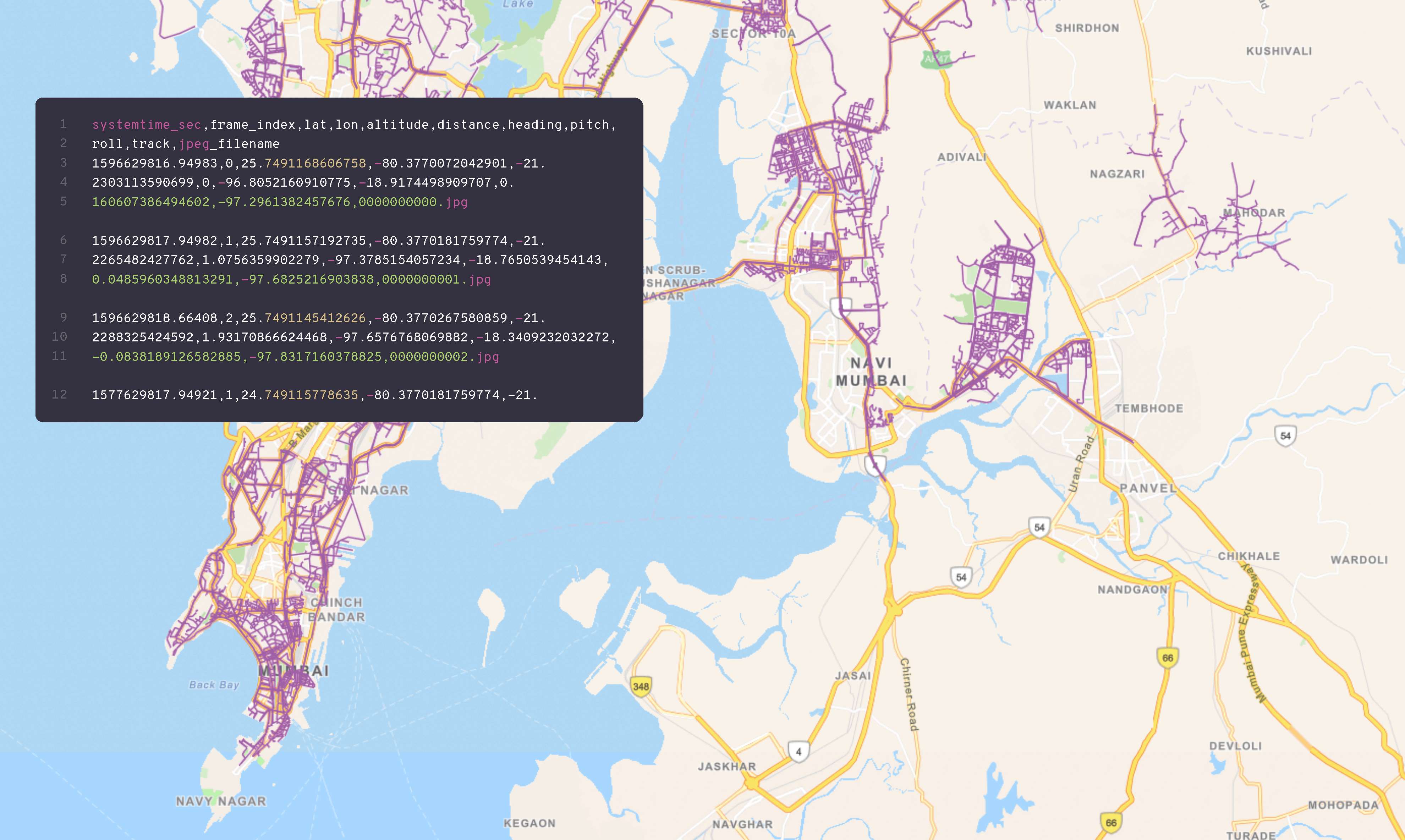
Trajectory data is a key component of mobile mapping technology. It refers to the series of location coordinates that are recorded by sensors on a mobile mapping system as it travels along a route. These coordinates can be used to generate a highly accurate and detailed digital map of the environment, including the position of road networks, buildings, and other infrastructure.
Mobile mapping systems typically use a combination of GPS, inertial measurement units (IMUs), and other sensors to collect trajectory data. The data is then processed using specialized software to create a detailed 3D model of the environment, which can be used for a range of applications, such as urban planning, infrastructure management, and emergency response.
Overall, trajectory data plays a vital role in mobile mapping and has numerous applications in urban planning, transportation, and related fields.