Description
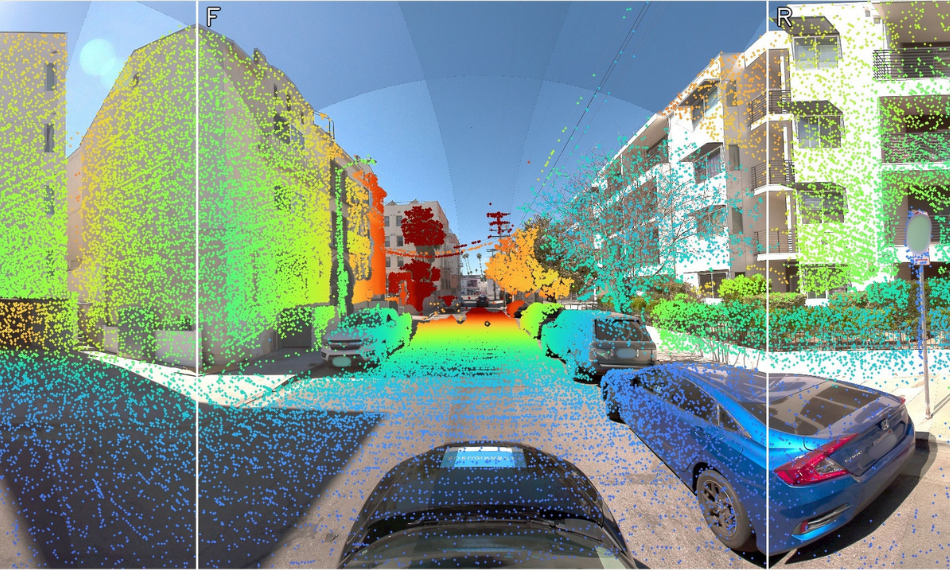
LiDAR data is comprised of densely-packed three-dimensional point clouds, and we optimize the output by simultaneously obtaining LiDAR data and spherical images during the capture process. This allows the spherical images to be used on their own for visual reference or to colourise the LiDAR data.
We can supply LiDAR data in multiple formats, including .e57, .las, .laz, .rcp, .rcs.